【R4-No.14】研究紹介:ロバスト制御とその実用化に向けて
工学科電気システム工学コース・准教授 長堂 勤
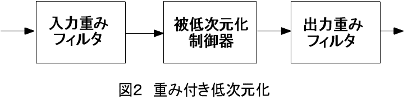
制御系の設計においては制御対象の数式モデルが用いられますが、厳密に正確な数式モデルを求めることは困難で、非常にコストが掛かる作業です。そこで数式モデルに、ある程度の不確かさを許容し、不確かさが存在しても制御システムの安定性や性能を保証する設計法が開発されました。それがロバスト(頑強)制御と呼ばれているものです。代表的なロバスト制御設計法としてH∞制御、μ-設計法があり、徐々に活用されてきています。
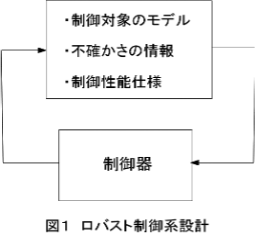
図1にあるようにその設計の際には制御対象の数式モデルに加え、不確かさの情報や制御性能の仕様を与えるため、得られる制御器は複雑で高次元なものとなるのが通常であり、そのままでは実装することが困難です。そこでロバスト制御器を簡単化すること、すなわち低次元化する必要があります。図2のように低次元近似の際、入出力側に重みフィルタを取り付けます。この重みフィルタの適切な選択により、特性劣化の少ない低次元ロバスト制御器を得ることができます。