【R6-No.4】研究紹介:LIDAR を用いた 3 次元センシングと点群解析による次世代型知的防犯カメラのためのオブジェクト検出技術
琉球大学 工学部 工学科 知能情報コース・教授 長山 格
(E-mail:nagayama@ie.u-ryukyu.ac.jp)
本研究室では事件や事故、犯罪行為等を自動検知できる次世代型インテリジェント防犯カメラシステムの研究開発に取り組んでいます。すでに防犯カメラシステムは社会の安全を守る基盤的インフラのひとつとして幅広く活用されていますが、本研究室では光学カメラを用いた従来の光学式防犯カメラだけでなく、 いくつかの優れた性質を持つ Lidar 型防犯カメラ技術の研究開発も進めています。 Lidarとは(Light Detection And Ranging)の略であり、無数のレーザー光を照射して、それらの反射から得られる情報に基づいて物体の形状や物体までの距離を測定するシステムです。Lidar は立体的な位置を持つ3 次元情報を容易に測定できることから、すでに測量や環境計測等の用途で活用されています。Lidarを防犯カメラシステムに応用することによって、遠距離や近距離における形状・位置・動きの情報を 3次元センシングすることが可能であり、さらに奥行き情報を立体的に測定することができるため、様々な防犯情報と環境情報の取得が可能です。一方、連続的な動きの精密測定や膨大なレーザー点群データの高速処理には工夫が必要とされることから、現時点ではいくつか乗り越えるべきハードルがあります。そのため、本研究室ではこれらの課題を解決する様々な取り組みを進めています。
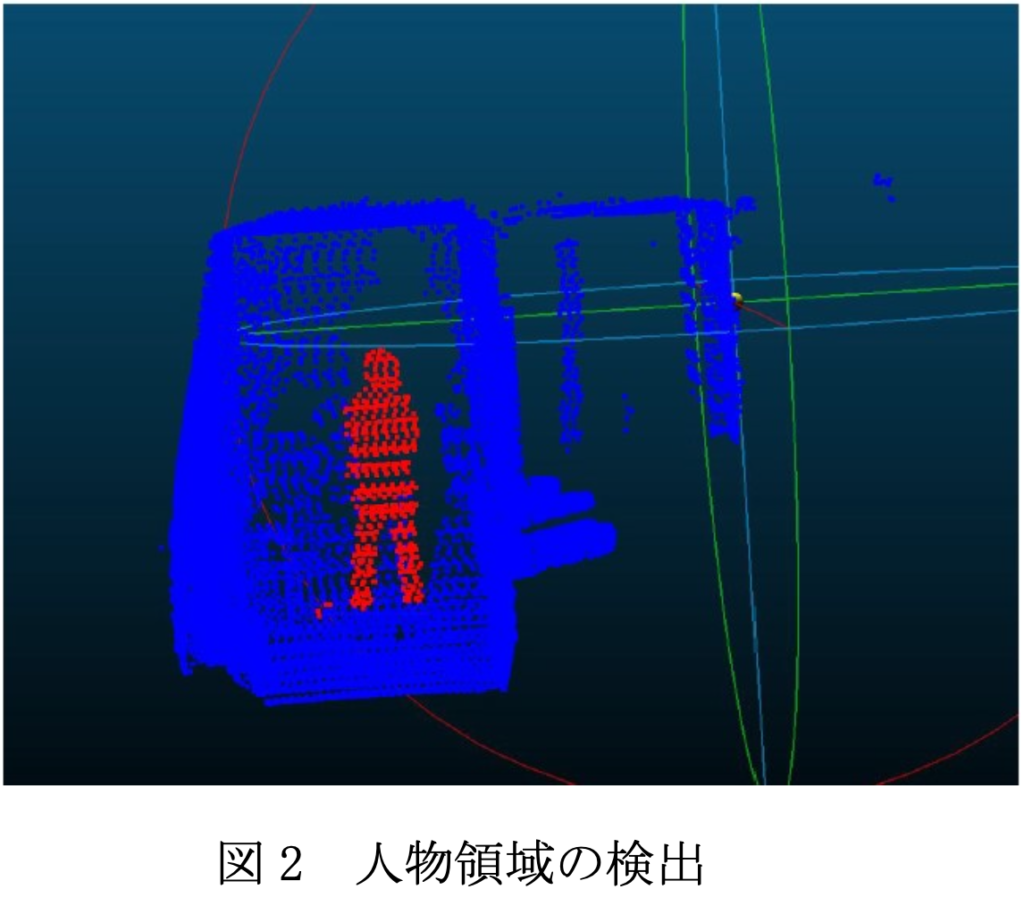
下の図 1 は、Lidar によって測定された屋内廊下での人物像で、測定されたレーザー点群データをマッピング表示したものです。しかし、 生の状態では廊下の床や壁と、人物の違いがはっきりとわからないのです。そのため、測定された点群データをひとつひとつ解析して、あるレーザー反射点データが何を表しているのかを推定しなければなりません。この推定を点群データが持つ情報から正しく実行するための「仕組み」が必要なのです。図 2 は本研究室で開発した「仕組み」を利用して、人間か否かを推定した結果です。図 2 のように、 壁や床と、 人間を正しく識別・推定できていることがわかります。これによって、点群データから人間だけを正確に検出できることになり、 3 次元センシングを利用した次世代型インテリジェント防犯カメラシステムの高度化・高性能化の可能性が示されます。